"If you want to build a spaceship, let’s build it.
Time is the only limit."
About Me
Who I Am
I’m an engineer passionate about robotics and autonomous systems, with a strong focus on advanced perception and sensor data processing such as LiDAR. My mission is to transform complex ideas into functional and scalable solutions, always aiming for efficiency and robustness in dynamic environments.
I work on research and development of intelligent systems capable of interacting with the world safely and efficiently. I enjoy sharing knowledge and collaborating on projects that push the boundaries of what’s possible in autonomy and artificial intelligence.
My Expertise
- Robotic Perception: Integration and processing of sensor data like LiDAR, IMU, and cameras for autonomous navigation.
- ROS2 & Distributed Systems: Node development, real-time pipelines, and communication using ROS2 and DDS.
- Computer Vision: Object detection, tracking, and segmentation using OpenCV, PCL, and deep neural networks.
- Machine Learning: Implementation of classical models and deep networks in PyTorch for classification and regression tasks.
My Current Roles
- 🚀 Chief Technical Officer – Multiperception AI
- 🎓 Industrial Mechatronics Technician – Tecsup
- 🤖 Robotics Researcher – Standalone
- 🛠️ Soon... Electronics Engineer
Research
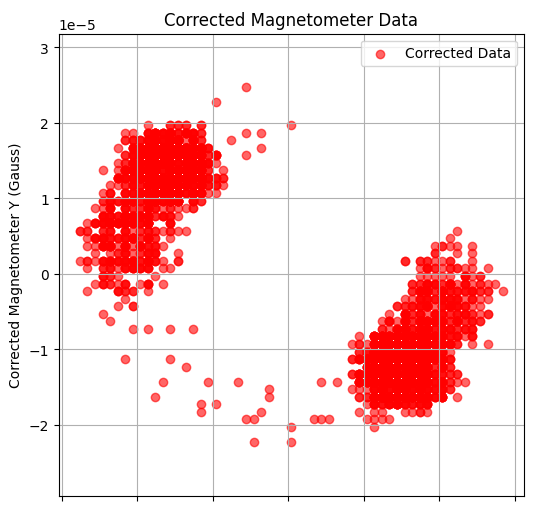
Magnetometer Distortion
An in-depth study on magnetometer distortion, exploring calibration techniques and their impact on sensor fusion for accurate orientation estimation.
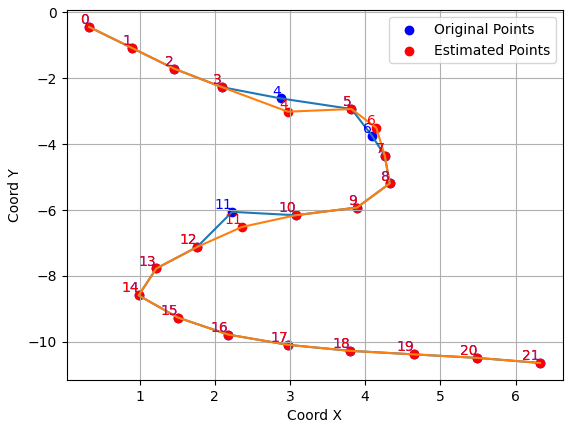
Odometry - EKF
Implementation and analysis of an Extended Kalman Filter (EKF) for robust odometry estimation in mobile robotics, enhancing localization accuracy.
Extended Kalman Filter
A comprehensive notebook on the Extended Kalman Filter (EKF), detailing its mathematical foundations and practical applications in state estimation.
Convolution
Exploring the concept of convolution in image processing and deep learning, with intuitive examples and practical implementations.
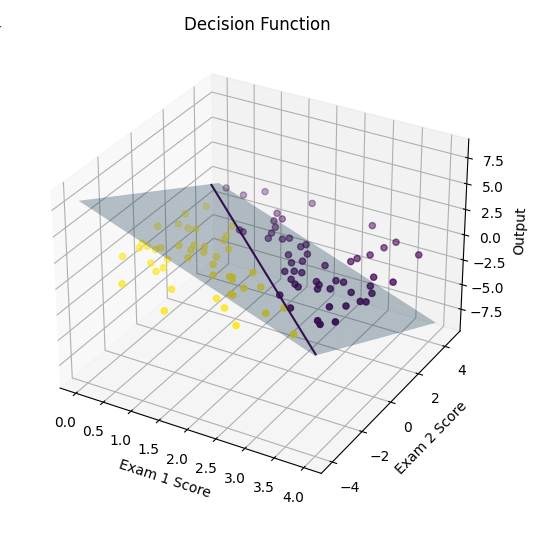
MachineLearning and Neurons
A foundational exploration of machine learning principles and the biological inspiration behind neural networks, with basic model implementations.
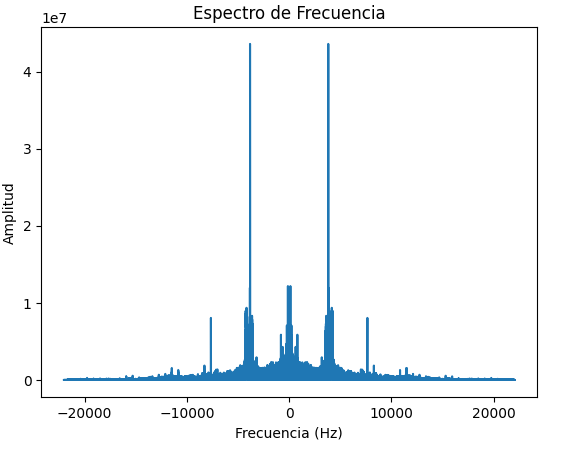
Fast Fourier Transform Filter
Implementation and application of the Fast Fourier Transform (FFT) for signal filtering, demonstrating its use in various data processing tasks.
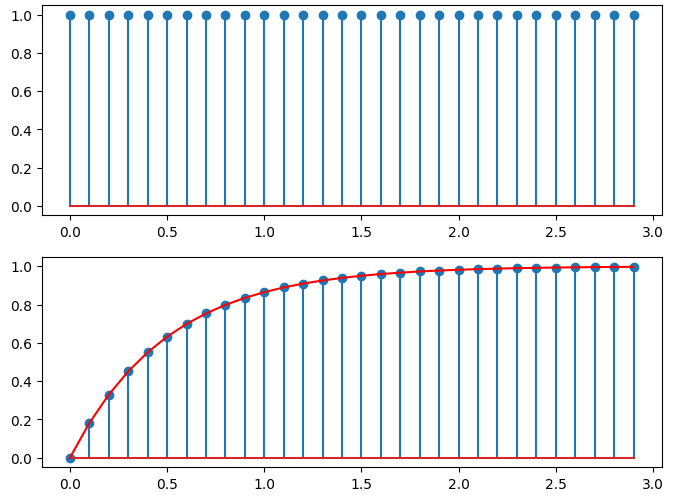
Z Transform
An interactive guide to the Z-transform, its properties, and applications in digital signal processing and system analysis.
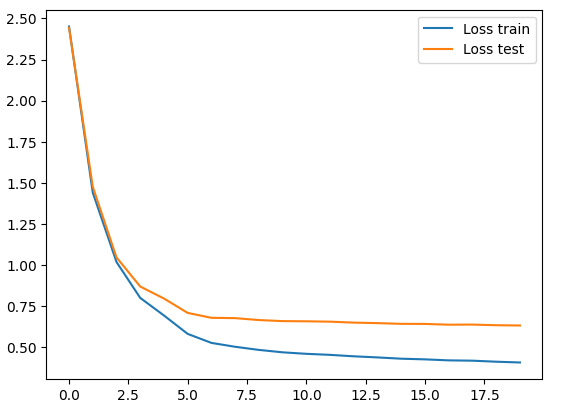
CNN MNIST From Scratch
Building a Convolutional Neural Network (CNN) from scratch to classify MNIST handwritten digits, focusing on core architectural concepts.
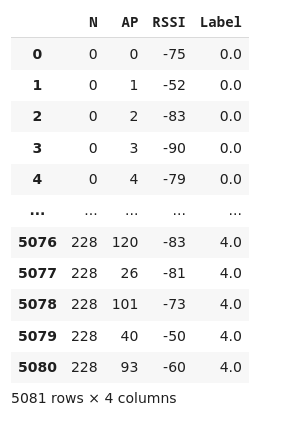
Wifi Classifier - ANN
Developing an Artificial Neural Network (ANN) to classify indoor locations based on WiFi signal strengths for localization purposes.
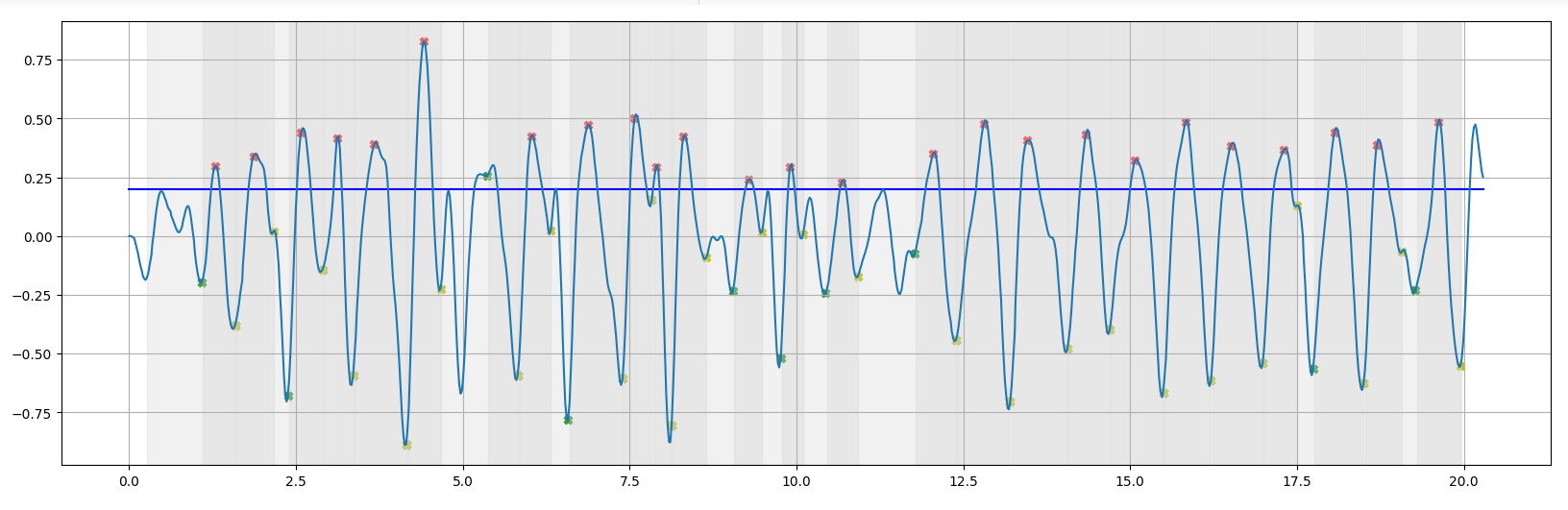
Step Counter
An algorithm for step counting using IMU data, leveraging statistical methods and filtering techniques for robust performance.
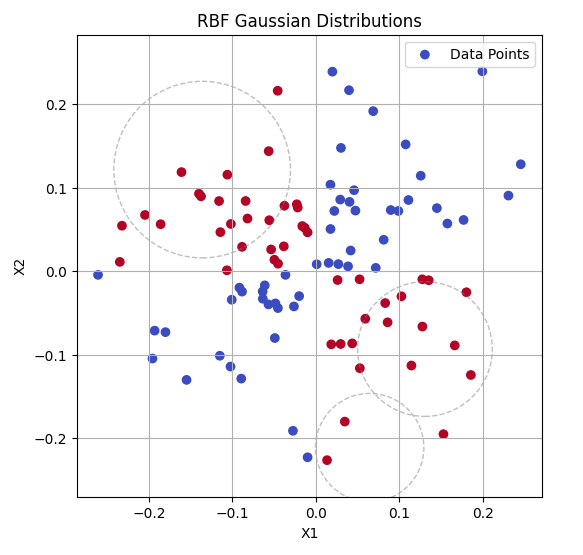
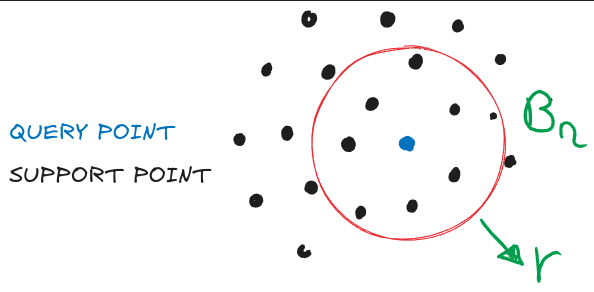
Radial Basis Function - Model
Understanding Radial Basis Function (RBF) networks and their application in function approximation and pattern recognition.
Laplace - Fourier
A comparative study of Laplace and Fourier transforms, highlighting their mathematical properties and utility in signal and system analysis.
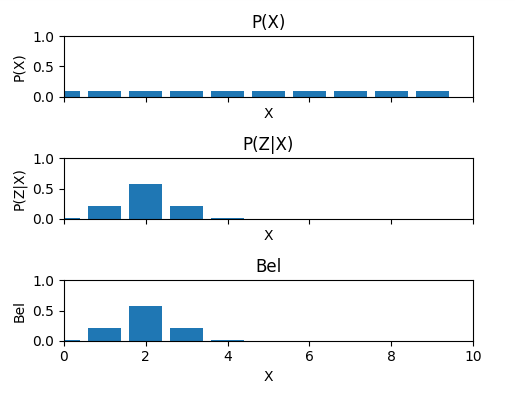
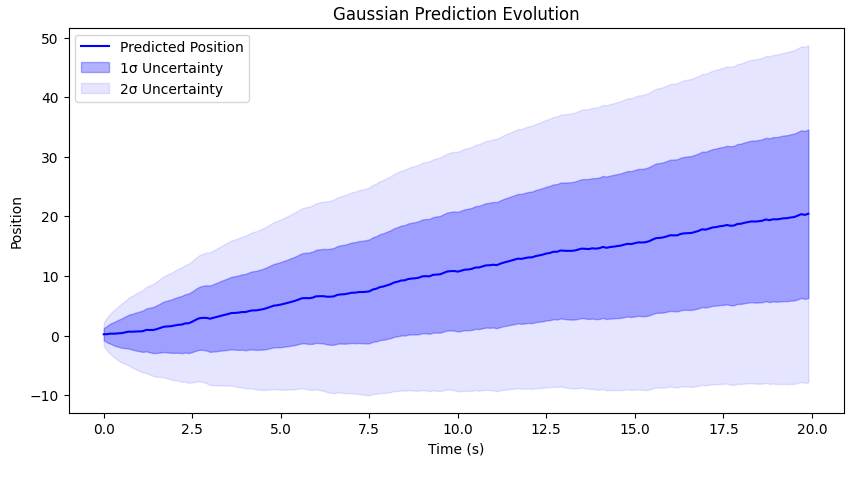
Bayes Filter
An introduction to the Bayes Filter, a fundamental concept in probabilistic robotics for state estimation under uncertainty.
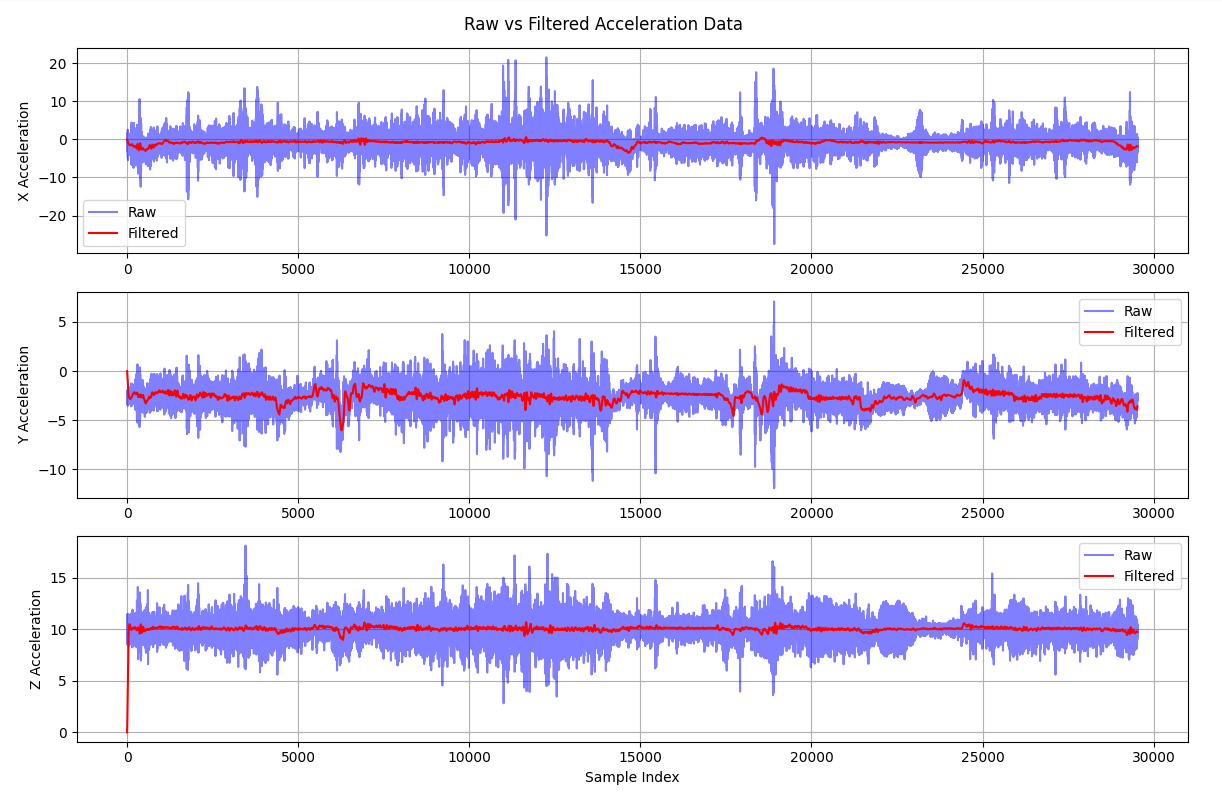
IMUFilter
Development and evaluation of filters for Inertial Measurement Unit (IMU) data, crucial for robust motion tracking and orientation.
Flow In Porous Media
Simulating fluid flow in porous media, with applications in nanotechnology and material science, exploring complex physical phenomena.
KPCONV Pointcloud Classifier
An exploration of KPCONV, a kernel point convolution-based classifier for point cloud data, applicable in 3D perception tasks.
Object Scanner Proposal
A proposal for an object scanning system, detailing the methodology and potential applications for 3D reconstruction and inspection.
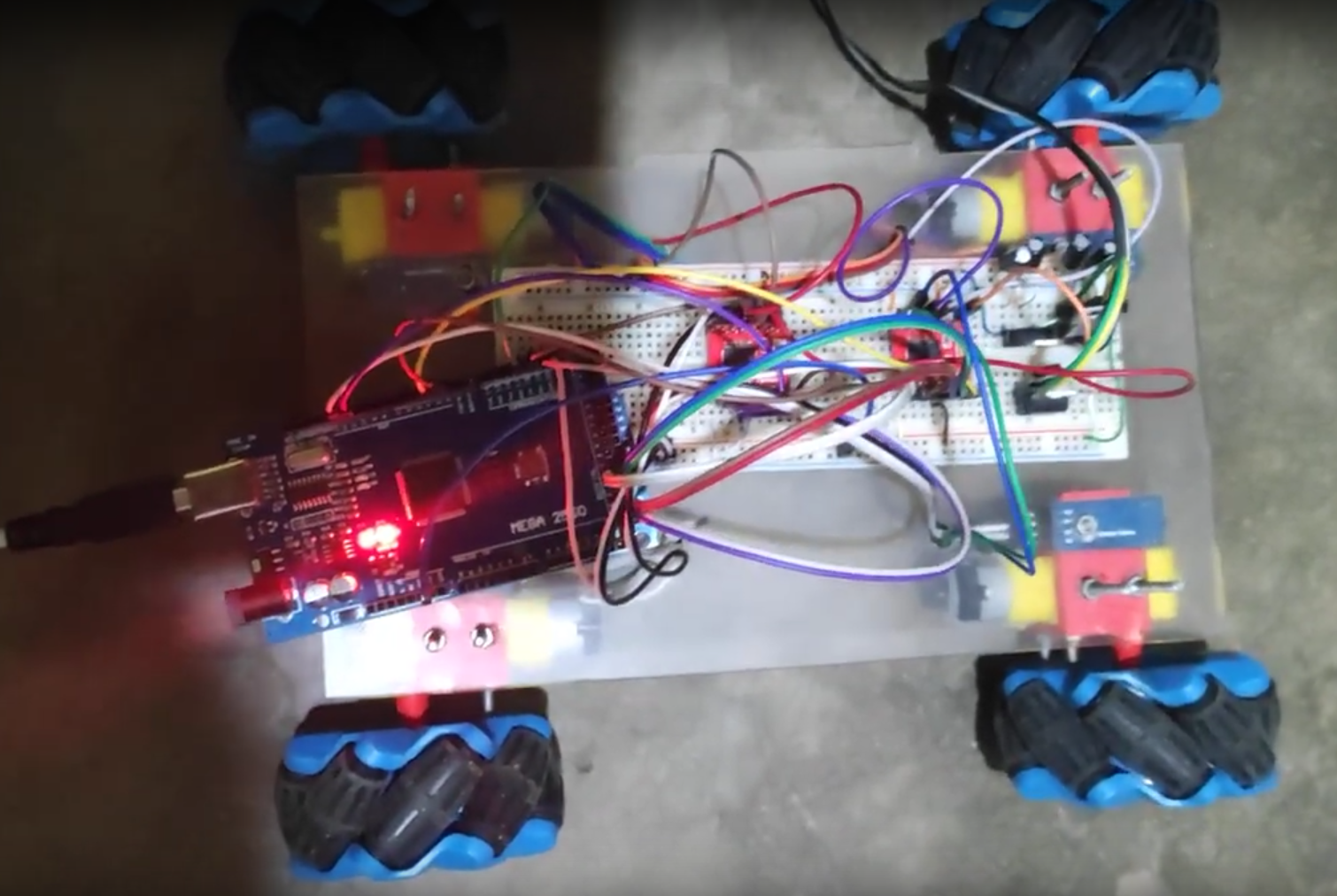
Omniwheel Controller
Design and implementation of a controller for omniwheel robots, enabling precise and versatile motion in complex environments.

Unity - Soil digging
A Unity simulation demonstrating soil digging mechanics, exploring physics-based interactions for heavy machinery applications.
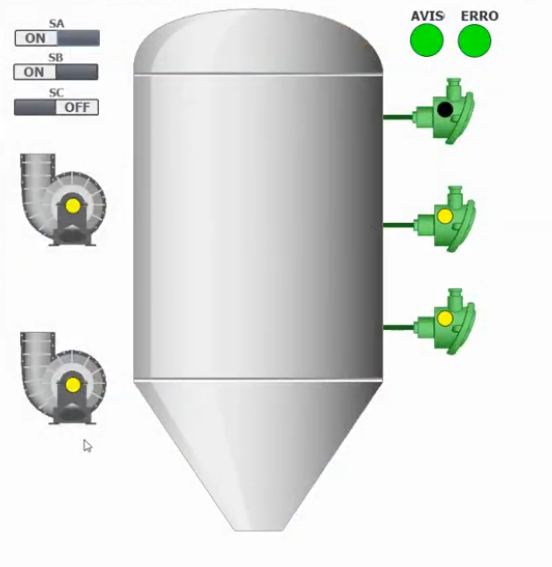
HMI - Tia Portal
Development of a Human-Machine Interface (HMI) using Siemens TIA Portal, focusing on intuitive control and monitoring of industrial processes.
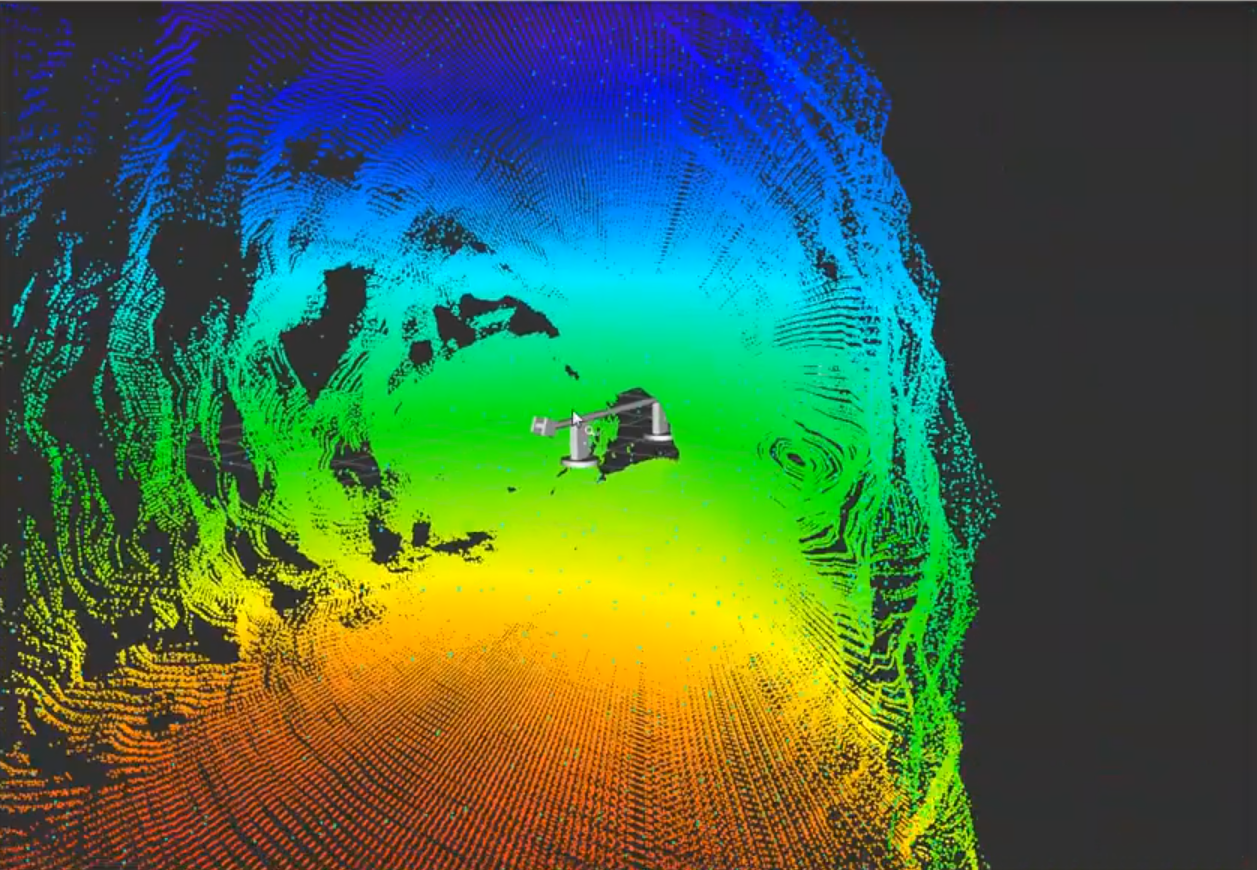
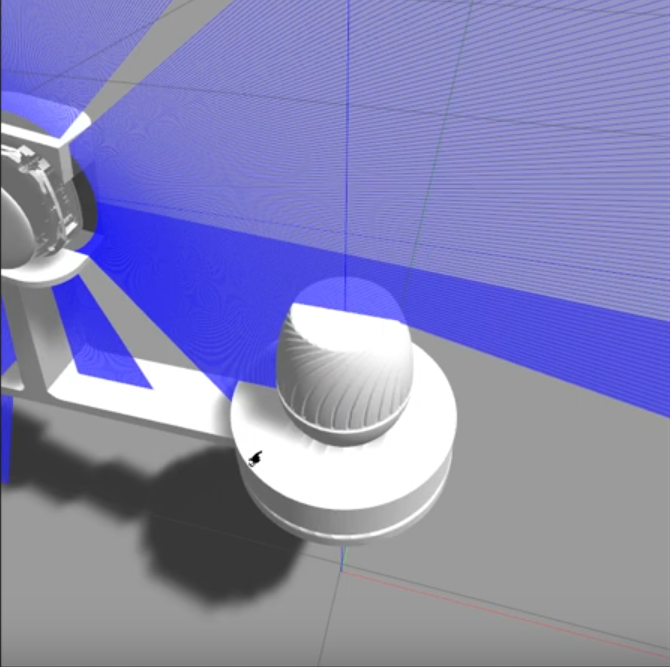
Ros & Unity - Pointcloud
Integration of ROS with Unity for real-time point cloud visualization and simulation, bridging robotics and virtual environments.
CONTROL PI - INTOUCH
Implementation of a PI controller in Wonderware InTouch, demonstrating its application in industrial process control and automation.
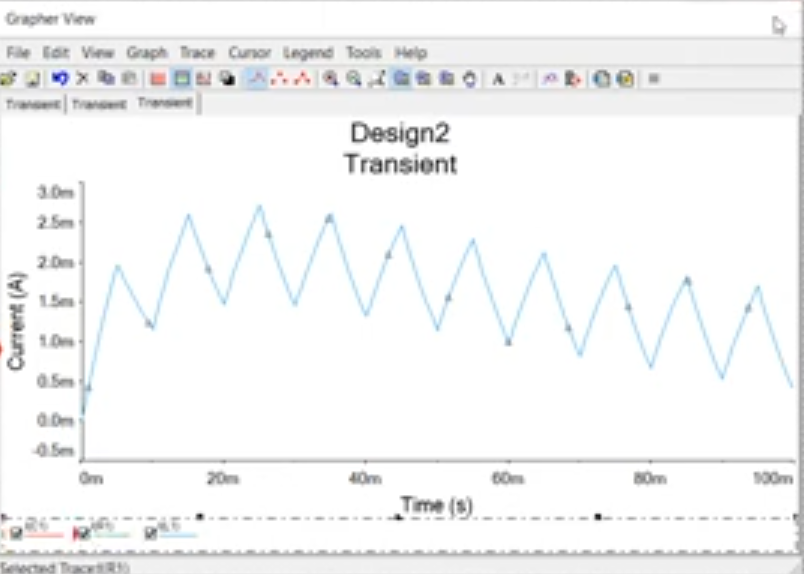
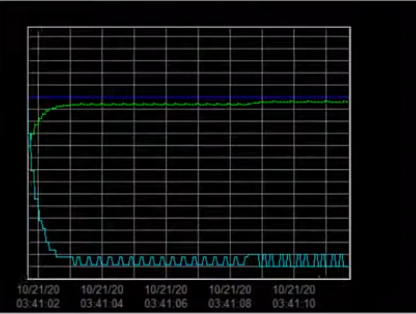
Circuito RLC
Analysis and simulation of RLC circuits, exploring their behavior in electrical systems and signal processing applications.

Unity - Mine Truck
A digital twin simulation of a mine truck in Unity, focusing on realistic vehicle dynamics and operational scenarios for training and analysis.
Project - Improved Localization
A project focused on enhancing localization accuracy for autonomous systems, integrating various sensor data and filtering techniques.
Proposal - Car 3D Mapping using 2D Lidar
A conceptual proposal for 3D car mapping using 2D LiDAR sensors, outlining a cost-effective approach to environmental perception.
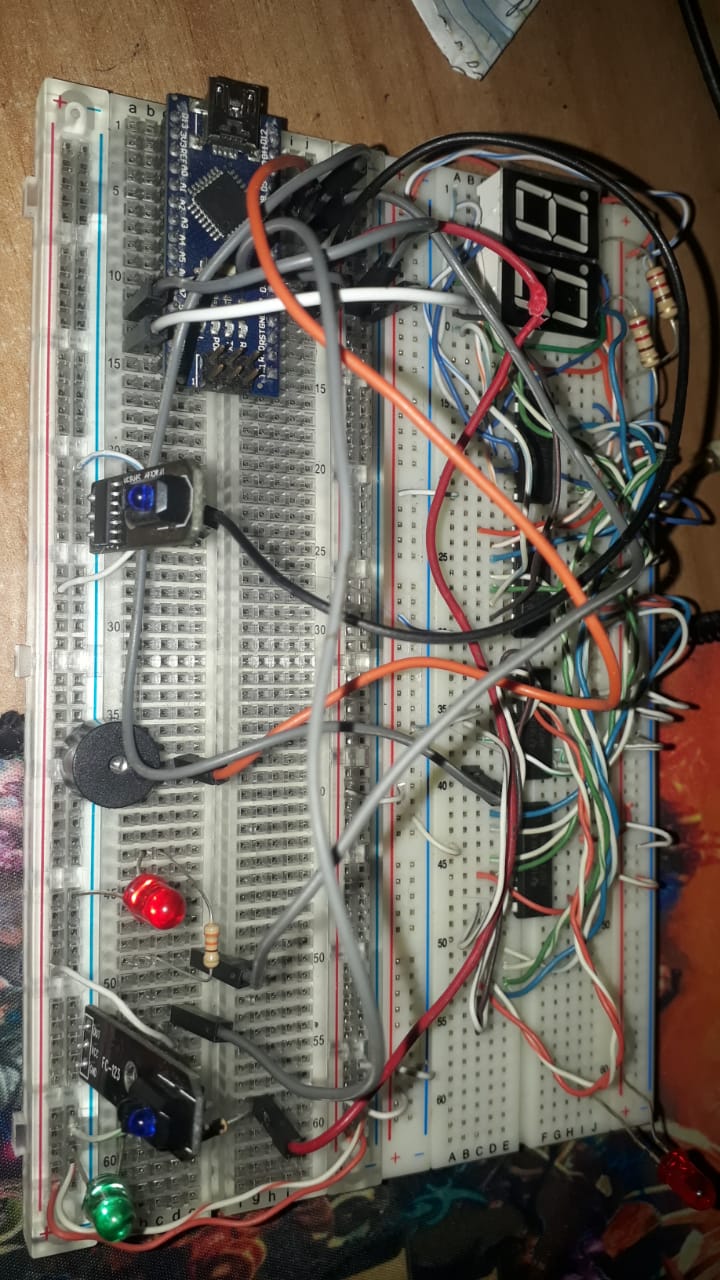
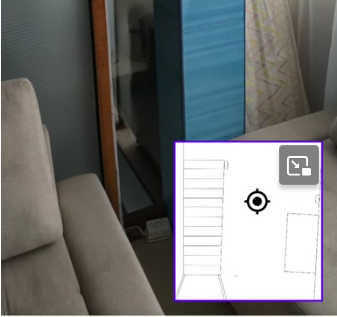
Capacity counter for a room
Development of a system to count the capacity of a room using sensor technology, focusing on practical implementation and accuracy.
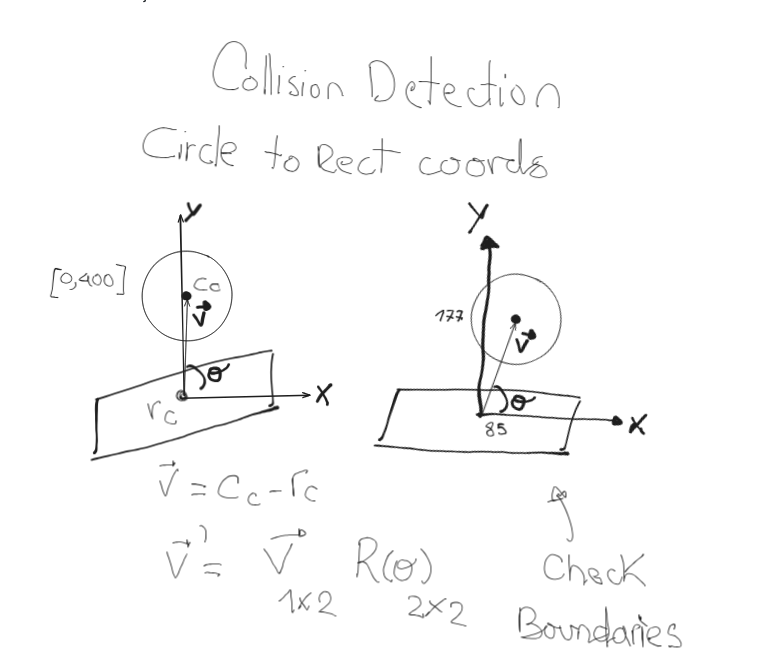
Bouncing Ball
A physics simulation of a bouncing ball, exploring classical mechanics and visualization techniques with a focus on mathematical accuracy.
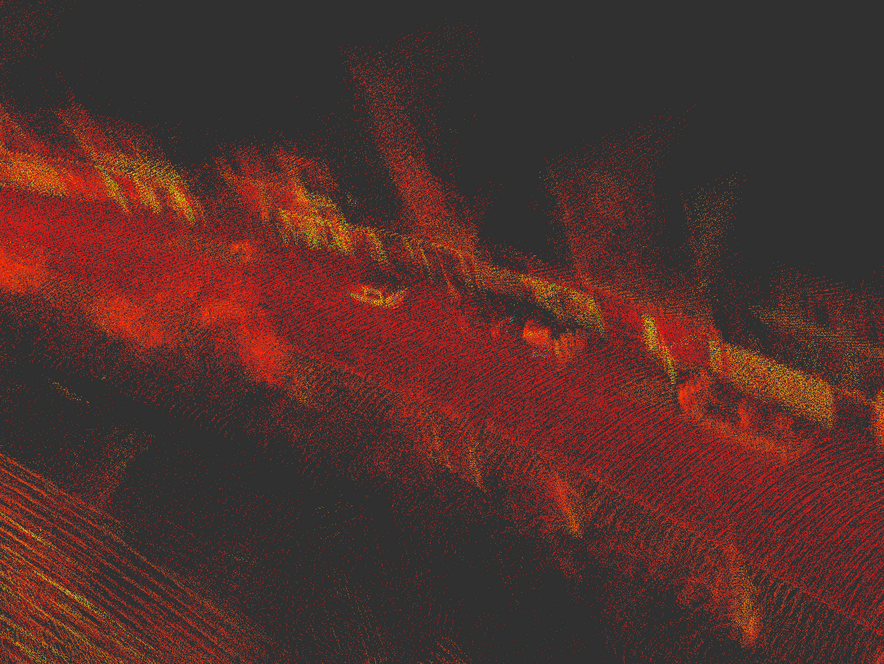
PointCloud Assembler ROS2
A ROS2 package for assembling point cloud data from multiple sensors into a unified map, crucial for 3D perception in robotics.
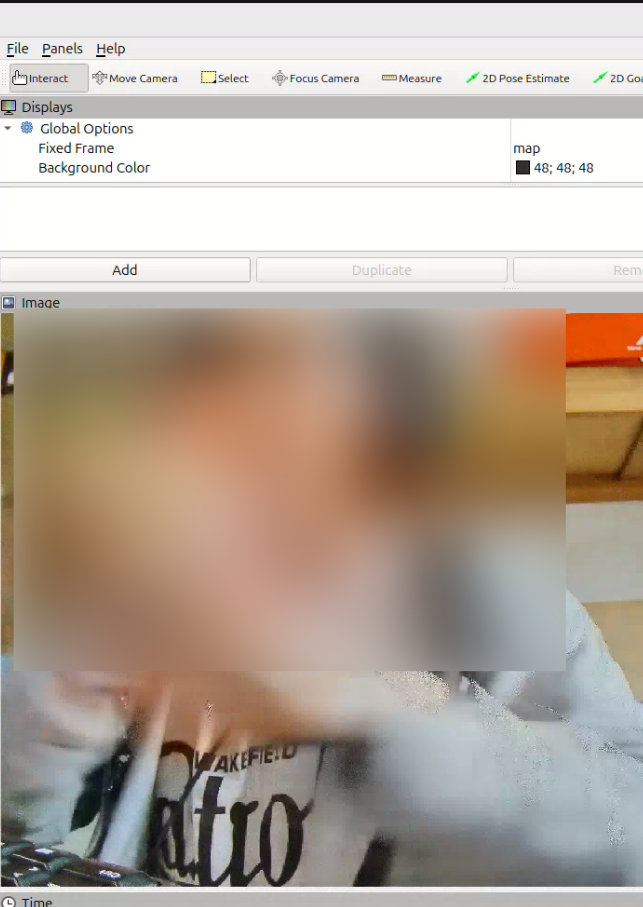
Hikvision Driver for ROS2
Development of a ROS2 driver for Hikvision cameras, enabling seamless integration of industrial cameras into robotic systems.
Modern CPP 2018 Course
A comprehensive course on Modern C++ (2018 standards), covering advanced features and best practices for high-performance applications.

Game Dev Cpp 2019 Course
A course focused on game development using C++, covering graphics, physics, and game engine principles from a low-level perspective.
Cpp Design Patterns
An exploration of common design patterns in C++, demonstrating how to build robust, scalable, and maintainable software architectures.